An intelligent solution integrating existing Smart City systems, IoT networks and security systems of cities and municipalities — with up to 242 TOPS of AI-accelerated analytics, 462+ machine-learning models and a horizontally scalable parallel infrastructure.
Abstract
IOAS Security Cluster (IOASC) is a distributed platform for real-time analysis of imagery from municipal camera systems. It integrates the existing infrastructure of Smart City deployments, IoT sensor networks and security systems of cities and municipalities in Slovakia. Architecturally it combines a dedicated AI hardware accelerator delivering 240 TOPS, a library of more than 462 machine-learned models and a parallel/decentralised compute framework that allows a single physical unit to process up to 19 concurrent camera streams with end-to-end latency below 80 ms. This article expands on the three pillars that the original concept only touched upon: (1) the model-creation pipeline, (2) high-performance computing and (3) parallel and distributed compute strategies.
1. Cluster architecture
IOASC is an intelligent solution providing integration of existing Smart City systems, IoT networks and security systems of cities and municipalities in Slovakia. Using IOASC cluster components it is possible to implement state-of-the-art data analytics and processing methods even for generationally outdated systems, including legacy infrastructure. The components of the system can analyse — in parallel — data from camera systems with up to 242 Tera Operations Per Second (TOPS), creating a fast and intelligent solution for advanced image analysis on already installed cameras.
The system implements more than 462 models for data processing, allowing the following qualitative parameters and their interrelations to be identified in real time:
- licence plate, factory model, vehicle colour
- vehicle classification — ambulance, fire brigade, police
- behavioural analytics of road users — pedestrians, cyclists
- identification of behavioural parameters in a perimeter — e.g. subject in a black jacket, male 35 – 45 years old, with a dog, in a cap; defining set of witnesses for an object
- measurement of object physical parameters — temperature, height, trajectories
- incident identification — violent behaviour, accident
- behavioural analytics of road-user trajectories
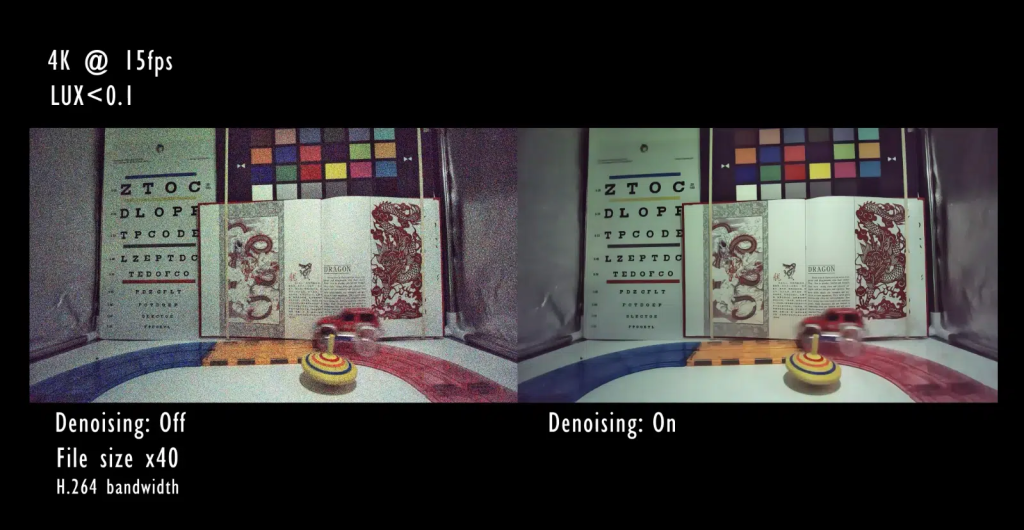
- qualitative post-processing of camera footage (denoising)
Based on the application of individual models it is possible to create any type of analytics function using machine learning, all in real time. The individual physical units are then connected into a cluster, which aggregates the resulting data and evaluates higher-order correlations:
- statistical parameters — number of commuters, number passing through a town/municipality
- vehicle behaviour
- traffic violations — section speed, trajectory violation, running a red light, failure to give way, failure to stop at a STOP sign and others
- prediction and modelling of traffic situations
- identification of flagged or monitored vehicles with correlation functions and prediction
- identification of vehicles deviating from the average trajectory — alcohol use, vehicle malfunction
These parameters are evaluated by the system across all connected cluster nodes; decentralisation of computational power guarantees real-time operation even with hundreds of parallel streams. Individual models are recursively tagged by the system itself and by operators (typically municipal police officers), enabling continuous classifier adaptation and a steady increase of output agreement with reality.
2. Model creation: the machine-learning pipeline
The library of 462+ models is not a static artefact — it is the product of a continuous MLOps cycle that IOAS operates for every client. The pipeline consists of seven stages, each independently containerised and horizontally scalable.
2.1 Data acquisition and curation
Input data come from three sources:
- RTSP/ONVIF streaming from the client’s existing camera systems — IOASC supports H.264, H.265 (HEVC) and AV1, with automatic detection and recovery from inconsistent keyframes or packet loss.
- Annotated corpora — for standard domains (vehicles, pedestrians, licence plates) IOAS maintains internal annotated datasets containing more than 2.4 million labelled frames (state of 2026 Q2), collected from real Slovak and Central-European municipal environments (varying lighting, weather, seasons).
- Operator history — municipal police forces and integrated emergency services provide feedback in the form of detection corrections, expanding the active-learning queue (section 2.4).
Before training, all data pass through a deidentification layer compatible with GDPR Art. 35 — faces of uninvolved persons are blurred, licence plates are not stored as raw characters but as one-hot embeddings for downstream tasks.
2.2 Model architectures
The IOASC library groups models into seven families by primary task:
| Family | Main architectures | Typical performance (FPS @ INT8 on 240 TOPS NPU) |
|---|---|---|
| Object detection | YOLOv8/v9, RT-DETR-L, EfficientDet-Lite | 350 – 600 FPS at 1280×720 |
| Multi-object tracking | ByteTrack, BoT-SORT, StrongSORT | 280 – 450 FPS |
| Automatic Number Plate Recognition (ANPR) | LPRNet + CRNN, ParseQ for OCR | 200 – 320 FPS |
| Action / behaviour recognition | SlowFast R50, TimeSformer, MViTv2 | 60 – 110 FPS (short 32-frame clips) |
| Person re-identification | OSNet-IBN, FastReID | 700 – 900 FPS per embedding |
| Image enhancement (denoising) | NAFNet, Restormer-S | 90 – 150 FPS at 1080p |
| Anomaly detection | PaDiM, PatchCore, AnomaLib stack | 250 – 380 FPS |
For each family IOAS maintains 3 – 5 versions at different accuracy ↔ latency trade-offs: *-tiny for edge nodes with limited budget, *-base for standard deployment, *-large for critical sites (central intersections, public-building entrances).
2.3 Training infrastructure
Training runs on a dedicated training cell of IOAS infrastructure with the following parameters:
- 8× NVIDIA H100 SXM linked over NVLink + InfiniBand 400 Gbps
- Distributed data-parallel training via PyTorch FSDP (Fully Sharded Data Parallel) with sharded optimizer state (ZeRO Stage 3)
- Mixed-precision BF16 / FP8 (Hopper sparsity) — 2.1 – 2.8× faster convergence than FP32
- Gradient accumulation with effective batch size 256 – 1024 depending on the model
- Stochastic Weight Averaging (SWA) in the final phase for more robust weights
- Per-experiment hyperparameter sweep via Optuna with the ASHA scheduler
Training a single production model takes between 6 hours (LPRNet fine-tune) and 5 days (RT-DETR-L on the proprietary 2.4 M-frame dataset).
2.4 Deployment optimisation (model serving)
Trained models pass through a three-stage compression before edge deployment:
- Structured pruning — removal of 30 – 60 % redundant weights via magnitude-based and Taylor-expansion criteria; reduces memory footprint while keeping > 99 % of the accuracy.
- Post-training INT8 calibration — calibration dataset of 1024 real frames, per-channel symmetric quantization; typical mAP loss < 0.8 %.
- Layer fusion + graph optimisation — Conv+BN+ReLU fusion, redundant reshape elimination, ONNX → TensorRT/Hailo-RT conversion.
This article is part of IOAS paid content.
Secure payment via Stripe · access restorable by e-mail, no sign-up