Inteligentné riešenie integrujúce existujúce Smart City systémy, IoT siete a bezpečnostné systémy miest a obcí — s AI-akcelerovanou analytikou až 242 TOPS, 462+ modelmi strojového učenia a horizontálne škálovateľnou paralelnou infraštruktúrou.
Abstrakt
IOAS Security Cluster (IOASC) je distribuovaná platforma pre real-time analýzu obrazu z mestských kamerových systémov, ktorá integruje existujúcu infraštruktúru Smart City riešení, IoT senzorové siete a bezpečnostné systémy miest a obcí v SR. Architektonicky kombinuje špecializovaný AI hardvérový akcelerátor s výkonom 240 TOPS, knižnicu vyše 462 strojovo-naučených modelov a paralelný/decentralizovaný výpočtový framework, ktorý umožňuje na jednej fyzickej jednotke spracovať až 19 paralelných kamerových streamov s end-to-end latenciou pod 80 ms. V tomto článku detailne rozpracujeme tri piliere systému, ktoré boli v pôvodnej koncepcii uvedené iba na úrovni vlastností: (1) pipeline tvorby modelov, (2) high-performance výpočítanie a (3) stratégie paralelného a distribuovaného počítania.
1. Architektúra klastra
IOASC je inteligentné riešenie poskytujúce integráciu už jestvujúcich systémov Smart City riešení, IoT sietí a bezpečnostných systémov miest a obcí v SR. S využitím komponentov klastra IOASC je možné implementovať najnovšie metódy analýzy a spracovania dát aj pre generačne zastaralé systémy vrátane jestvujúcej infraštruktúry. Jednotlivé komponenty systému vedia s výkonom až 242 Tera operácií za sekundu (TOPS) paralelne analyzovať dáta z kamerových systémov a vytvoriť tak rýchle a inteligentné riešenie pre pokročilú analýzu obrazu s využitím už nainštalovaných kamier.
V rámci analýzy systém implementuje viac ako 462 modelov pre spracovanie dát, čo umožňuje rámcovo identifikovať nasledovné kvalitatívne parametre a ich vzájomné súvislosti v reálnom čase:
- ŠPZ, továrenský typ a farba vozidla
- zaradenie vozidiel — sanitka, hasiči, polícia
- behaviorálna analytika účastníkov dopravy — chodcov, cyklistov
- identifikácia behaviorálnych parametrov v danom perimetri (napr. subjekt v čiernej bunde, muž 35 – 45 rokov, s psom, v šiltovke), definičný súbor svedkov daného objektu
- meranie fyzikálnych parametrov objektov — teplota, výška, trajektórie
- identifikácia incidentov — násilné správanie, nehoda
- behaviorálna analytika trajektórie účastníkov cestnej premávky
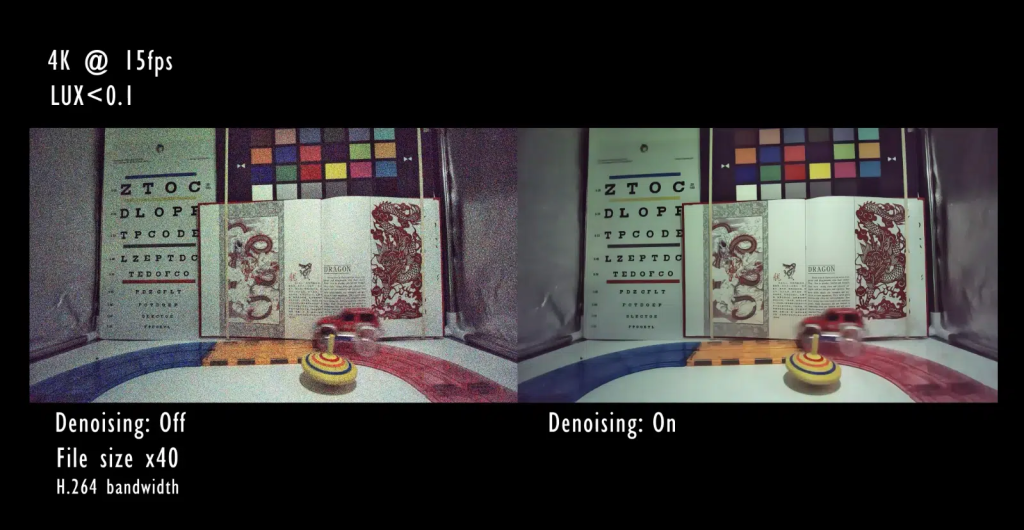
- kvalitatívny postprocesing kamerových záznamov (denoising)
Na základe aplikácie jednotlivých modelov je možné vytvoriť akýkoľvek typ analytických funkcií s využitím strojového učenia v reálnom čase. Jednotlivé fyzické jednotky sú spojené do klastra, ktorý takto identifikované dáta následne agreguje a vyhodnocuje vyššie korelačné funkcie:
- identifikácia štatistických parametrov — počet pendlerov, počet prechádzajúcich mestom/obcou
- behaviorálne správanie sa vozidiel
- porušovanie dopravných predpisov — úsekové meranie rýchlosti, porušenie trajektórie, prechod na červenú, nedanie prednosti v jazde, nezastavenie na značku STOP a ďalšie
- predikcia dopravných situácií a modelovanie
- identifikácia závadových alebo monitorovaných vozidiel s korelačnými funkciami a predikciou
- identifikácia vozidiel porušujúcich priemernú trajektóriu — požitie alkoholu, porucha na vozidle
Vyššie uvedené parametre vyhodnocuje systém zo všetkých pripojených uzlov klastra, pričom decentralizácia výpočtového výkonu zaručuje prácu v reálnom čase aj pri stovkách paralelných streamov. Jednotlivé modely sú rekurzívne tagované samotným systémom a operátormi (napr. príslušníkmi mestských polícií), čo umožňuje kontinuálnu adaptáciu klasifikátorov a postupné zvyšovanie zhody výstupov s realitou.
2. Tvorba modelov: pipeline strojového učenia
Knižnica 462+ modelov nie je statickým artefaktom — je produktom kontinuálneho MLOps cyklu, ktorý IOAS prevádzkuje pre každého klienta. Pipeline pozostáva zo siedmich etáp, pričom každá je horizontálne škálovateľná a izolovaná v samostatnom kontajnerizovanom workflow.
2.1 Zber a kurátorstvo dát
Vstupné dáta pochádzajú z troch zdrojov:
- RTSP/ONVIF streaming z existujúcich kamerových systémov klienta — IOASC podporuje H.264, H.265 (HEVC) a AV1, s automatickou detekciou a riešením nekonzistentných keyframov či packet-loss.
- Anotované korpusy — pre štandardné domény (vozidlá, chodci, ŠPZ) IOAS udržiava interné anotované datasety s viac než 2,4 mil. označenými snímkami (stav 2026 Q2), ktoré boli zozbierané z reálnych slovenských a stredoeurópskych mestských prostredí (rôzne svetelné podmienky, počasie, ročné obdobia).
- Historické záznamy operátorov — mestské polície a integrované záchranné systémy poskytujú spätnú väzbu vo forme korekcií detekcií, čím sa rozširuje active-learning fronta (sekcia 2.4).
Pred trénovaním všetky dáta prechádzajú deidentifikačnou vrstvou kompatibilnou s GDPR čl. 35 — tváre nezúčastnených osôb sú rozmazané, ŠPZ neukladajú surové znaky, ale ich one-hot embedding pre downstream tasky.
2.2 Architektúry modelov
V knižnici IOASC sú modely zoskupené do siedmich rodín podľa primárnej úlohy:
| Rodina | Hlavné architektúry | Typický výkon (FPS @ INT8 na 240 TOPS NPU) |
|---|---|---|
| Object detection | YOLOv8/v9, RT-DETR-L, EfficientDet-Lite | 350 – 600 FPS pri 1280×720 |
| Multi-object tracking | ByteTrack, BoT-SORT, StrongSORT | 280 – 450 FPS |
| Automatic Number Plate Recognition (ANPR) | LPRNet + CRNN, ParseQ pre OCR | 200 – 320 FPS |
| Action / behaviour recognition | SlowFast R50, TimeSformer, MViTv2 | 60 – 110 FPS (krátke 32-frame klipy) |
| Person re-identification | OSNet-IBN, FastReID | 700 – 900 FPS na embedding |
| Image enhancement (denoising) | NAFNet, Restormer-S | 90 – 150 FPS pri 1080p |
| Anomaly detection | PaDiM, PatchCore, AnomaLib stack | 250 – 380 FPS |
Pre každú rodinu IOAS udržiava 3 – 5 verzií v rôznych pomeroch presnosť ↔ latencia: *-tiny pre okrajové uzly s obmedzeným výkonom, *-base pre štandardné nasadenie, *-large pre kritické trate (centrálne križovatky, vstupy do verejných budov).
2.3 Trénovacia infraštruktúra
Trénovanie prebieha na samostatnej training cell IOAS infraštruktúry s nasledujúcimi parametrami:
- 8× NVIDIA H100 SXM spojené cez NVLink + InfiniBand 400 Gbps
- Distribuovaný data-parallel training cez PyTorch FSDP (Fully Sharded Data Parallel) so sharded optimizer state (ZeRO Stage 3)
- Mixed-precision BF16 / FP8 (Hopper sparsity) — 2,1 – 2,8× rýchlejšie konvergovanie oproti FP32
- Gradient accumulation s effective batch size 256 – 1024 podľa modelu
- Stochastic Weight Averaging (SWA) v poslednej fáze pre robustnejšie weights
- Per-experiment hyperparameter sweep cez Optuna s ASHA scheduler-om
Doba trénovania jedného produkčného modelu sa pohybuje od 6 hodín (LPRNet fine-tune) do 5 dní (RT-DETR-L na vlastnom 2,4M-snímkovom datasete).
2.4 Optimalizácia pre nasadenie (model serving)
Vytrénované modely prechádzajú trojstupňovou kompresiou pred nasadením na hranu:
- Štruktúrovaný pruning — odstránenie 30 – 60 % redundantných váh cez magnitude-based + Taylor-expansion kritériá; znižuje pamäťový footprint pri zachovaní > 99 % presnosti.
- Kvantizácia INT8 (post-training calibration) — kalibračný dataset 1024 reálnych snímkov, per-channel symetrická kvantizácia; typická strata < 0,8 % mAP.
- Layer fusion + grafová optimalizácia — Conv+BN+ReLU fúzia, eliminácia redundantných reshape operácií, ONNX → TensorRT/Hailo-RT conversion.
Tento článok je súčasťou plateného obsahu IOAS.
Bezpečná platba cez Stripe · prístup obnoviteľný cez e-mail, bez registrácie