Eine intelligente Lösung, die bestehende Smart-City-Systeme, IoT-Netze und Sicherheitssysteme von Städten und Gemeinden integriert — mit bis zu 242 TOPS KI-beschleunigter Analytik, 462+ Machine-Learning-Modellen und horizontal skalierbarer paralleler Infrastruktur.
Zusammenfassung
IOAS Security Cluster (IOASC) ist eine verteilte Plattform für die Echtzeit-Bildanalyse aus städtischen Kamerasystemen, die die bestehende Infrastruktur von Smart-City-Lösungen, IoT-Sensornetzen und Sicherheitssystemen von Städten und Gemeinden in der Slowakei integriert. Architektonisch kombiniert sie einen dedizierten KI-Hardware-Beschleuniger mit 240 TOPS Leistung, eine Bibliothek von mehr als 462 Machine-Learning-Modellen und ein paralleles/dezentralisiertes Compute-Framework, das einer einzelnen physischen Einheit die Verarbeitung von bis zu 19 gleichzeitigen Kamerastreams mit einer End-to-End-Latenz unter 80 ms erlaubt. In diesem Artikel werden die drei Säulen, die im ursprünglichen Konzept nur angerissen wurden, im Detail ausgearbeitet: (1) die Modellerstellungs-Pipeline, (2) Hochleistungsrechnen (HPC) und (3) parallele und verteilte Rechenstrategien.
1. Cluster-Architektur
IOASC ist eine intelligente Lösung zur Integration bestehender Smart-City-Systeme, IoT-Netze und Sicherheitssysteme von Städten und Gemeinden in der Slowakei. Mit Komponenten des IOASC-Clusters lassen sich modernste Datenanalyse- und Verarbeitungsmethoden auch in generationsalten Systemen einschließlich der bestehenden Infrastruktur einsetzen. Die Komponenten des Systems können Daten aus Kamerasystemen mit bis zu 242 Tera Operations Per Second (TOPS) parallel analysieren und so eine schnelle und intelligente Lösung für fortgeschrittene Bildanalyse über bereits installierte Kameras bereitstellen.
Das System implementiert mehr als 462 Modelle zur Datenverarbeitung, sodass folgende qualitativen Parameter und ihre Wechselbeziehungen in Echtzeit identifiziert werden können:
- Kennzeichen, Werksmodell und Fahrzeugfarbe
- Fahrzeugklassifikation — Krankenwagen, Feuerwehr, Polizei
- Verhaltensanalytik der Verkehrsteilnehmer — Fußgänger, Radfahrer
- Identifikation von Verhaltensparametern in einem Perimeter (z. B. Subjekt in schwarzer Jacke, Mann 35 – 45 Jahre, mit Hund, mit Schirmmütze); Definitionsmenge der Zeugen eines Objekts
- Messung physischer Parameter von Objekten — Temperatur, Höhe, Trajektorien
- Vorfallserkennung — gewalttätiges Verhalten, Unfall
- Verhaltensanalytik der Trajektorien von Verkehrsteilnehmern
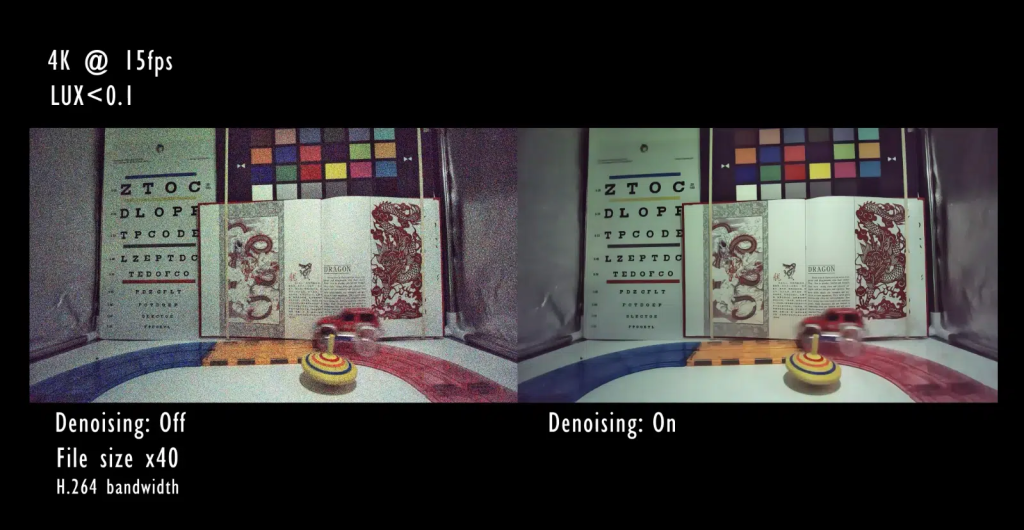
- qualitative Nachverarbeitung von Kameramaterial (Denoising)
Auf Basis der Anwendung einzelner Modelle lässt sich jeder Typ von Analytikfunktion mit Machine Learning erstellen — alles in Echtzeit. Die einzelnen physischen Einheiten werden zu einem Cluster verbunden, der die so identifizierten Daten aggregiert und Korrelationsfunktionen höherer Ordnung berechnet:
- statistische Parameter — Anzahl Pendler, Anzahl der Durchfahrten durch eine Stadt/Gemeinde
- Fahrzeugverhalten
- Verkehrsverstöße — Section Speed, Trajektorienverletzung, Rotlichtfahrt, Vorfahrtsverletzung, Nichtanhalten am STOP-Schild u. a.
- Vorhersage und Modellierung von Verkehrssituationen
- Identifikation markierter oder beobachteter Fahrzeuge mit Korrelations- und Vorhersagefunktionen
- Identifikation von Fahrzeugen mit Trajektorienabweichung — Alkoholgenuss, Fahrzeugstörung
Die genannten Parameter werden vom System über alle angeschlossenen Cluster-Knoten ausgewertet; die Dezentralisierung der Rechenleistung garantiert Echtzeitbetrieb auch bei hunderten parallelen Streams. Einzelne Modelle werden rekursiv vom System selbst und von Operatoren (typischerweise Beamten der Stadtpolizei) getaggt, was eine kontinuierliche Klassifikator-Anpassung und stetig steigende Übereinstimmung der Ausgaben mit der Realität ermöglicht.
2. Modellerstellung: Machine-Learning-Pipeline
Die Bibliothek mit 462+ Modellen ist kein statisches Artefakt — sie ist Produkt eines kontinuierlichen MLOps-Zyklus, den IOAS für jeden Kunden betreibt. Die Pipeline besteht aus sieben Stufen, jede unabhängig containerisiert und horizontal skalierbar.
2.1 Datenerfassung und Kuratierung
Eingabedaten kommen aus drei Quellen:
- RTSP/ONVIF-Streaming aus den bestehenden Kamerasystemen des Kunden — IOASC unterstützt H.264, H.265 (HEVC) und AV1 mit automatischer Erkennung und Wiederherstellung bei inkonsistenten Keyframes oder Paketverlust.
- Kuratierte Korpora — für Standarddomänen (Fahrzeuge, Fußgänger, Kennzeichen) hält IOAS interne annotierte Datensätze mit über 2,4 Mio. gelabelten Frames vor (Stand 2026 Q2), erhoben aus realen slowakischen und mitteleuropäischen Stadtumgebungen (verschiedene Lichtverhältnisse, Wetterlagen, Jahreszeiten).
- Operator-Historie — Stadtpolizeien und integrierte Rettungsdienste liefern Feedback in Form von Detektionskorrekturen, was die Active-Learning-Queue (Abschnitt 2.4) erweitert.
Vor dem Training durchlaufen alle Daten eine Deidentifikationsschicht im Sinne von DSGVO Art. 35 — Gesichter unbeteiligter Personen werden unkenntlich gemacht, Kennzeichen werden nicht als Rohzeichen, sondern als One-Hot-Embeddings für Downstream-Tasks gespeichert.
2.2 Modellarchitekturen
Die IOASC-Bibliothek gruppiert Modelle in sieben Familien nach primärer Aufgabe:
| Familie | Hauptarchitekturen | Typische Leistung (FPS @ INT8 auf 240 TOPS NPU) |
|---|---|---|
| Objektdetektion | YOLOv8/v9, RT-DETR-L, EfficientDet-Lite | 350 – 600 FPS bei 1280×720 |
| Multi-Object-Tracking | ByteTrack, BoT-SORT, StrongSORT | 280 – 450 FPS |
| Automatische Kennzeichenerkennung (ANPR) | LPRNet + CRNN, ParseQ für OCR | 200 – 320 FPS |
| Action / Verhaltenserkennung | SlowFast R50, TimeSformer, MViTv2 | 60 – 110 FPS (kurze 32-Frame-Clips) |
| Personen-Re-Identifikation | OSNet-IBN, FastReID | 700 – 900 FPS pro Embedding |
| Bildverbesserung (Denoising) | NAFNet, Restormer-S | 90 – 150 FPS bei 1080p |
| Anomalieerkennung | PaDiM, PatchCore, AnomaLib-Stack | 250 – 380 FPS |
Für jede Familie hält IOAS 3 – 5 Versionen in unterschiedlichen Genauigkeit ↔ Latenz-Verhältnissen: *-tiny für Edge-Knoten mit knappem Budget, *-base für Standardeinsatz, *-large für kritische Standorte (zentrale Kreuzungen, Eingänge öffentlicher Gebäude).
2.3 Trainingsinfrastruktur
Das Training läuft in einer dedizierten Training Cell der IOAS-Infrastruktur mit folgenden Parametern:
- 8× NVIDIA H100 SXM verbunden über NVLink + InfiniBand 400 Gbps
- Verteiltes Data-Parallel-Training über PyTorch FSDP (Fully Sharded Data Parallel) mit shardiertem Optimizer-State (ZeRO Stage 3)
- Mixed-Precision BF16 / FP8 (Hopper Sparsity) — 2,1 – 2,8× schnellere Konvergenz als FP32
- Gradient Accumulation mit effektiver Batchgröße 256 – 1024 je nach Modell
- Stochastic Weight Averaging (SWA) in der Schlussphase für robustere Gewichte
- Pro Experiment Hyperparameter-Sweep über Optuna mit ASHA-Scheduler
Das Training eines einzelnen Produktionsmodells dauert zwischen 6 Stunden (LPRNet-Fine-Tune) und 5 Tagen (RT-DETR-L auf dem hauseigenen 2,4-Mio.-Frame-Datensatz).
2.4 Deployment-Optimierung (Model Serving)
Trainierte Modelle durchlaufen vor dem Edge-Einsatz eine dreistufige Kompression:
- Strukturiertes Pruning — Entfernung von 30 – 60 % redundanten Gewichten über magnitude- und Taylor-Expansion-Kriterien; reduziert den Speicher-Footprint bei > 99 % erhaltener Genauigkeit.
- Post-Training INT8-Kalibrierung — Kalibrierungsdatensatz aus 1024 echten Frames, per-channel symmetrische Quantisierung; typischer mAP-Verlust < 0,8 %.
- Layer Fusion + Graph-Optimierung — Fusion von Conv+BN+ReLU, Eliminierung redundanter Reshape-Operationen, ONNX → TensorRT/Hailo-RT Konvertierung.
Dieser Artikel ist Teil der kostenpflichtigen IOAS-Inhalte.
Sichere Zahlung über Stripe · Zugang per E-Mail wiederherstellbar, ohne Registrierung