Inteligentne rozwiązanie integrujące istniejące systemy Smart City, sieci IoT oraz systemy bezpieczeństwa miast i gmin — z analityką AI o mocy do 242 TOPS, 462+ modelami uczenia maszynowego i poziomo skalowalną infrastrukturą równoległą.
Streszczenie
IOAS Security Cluster (IOASC) to rozproszona platforma do analizy obrazu w czasie rzeczywistym z miejskich systemów kamerowych, integrująca istniejącą infrastrukturę rozwiązań Smart City, sieci czujników IoT oraz systemy bezpieczeństwa miast i gmin na Słowacji. Architektonicznie łączy dedykowany akcelerator sprzętowy AI o mocy 240 TOPS, bibliotekę ponad 462 modeli uczenia maszynowego oraz równoległy/zdecentralizowany framework obliczeniowy, który pozwala jednej fizycznej jednostce obsługiwać do 19 równoległych strumieni kamerowych z opóźnieniem end-to-end poniżej 80 ms. W tym artykule szczegółowo rozwijamy trzy filary systemu, które w pierwotnej koncepcji zostały przedstawione tylko ogólnie: (1) potok tworzenia modeli, (2) obliczenia o wysokiej wydajności (HPC) i (3) strategie obliczeń równoległych i rozproszonych.
1. Architektura klastra
IOASC to inteligentne rozwiązanie zapewniające integrację istniejących systemów Smart City, sieci IoT i systemów bezpieczeństwa miast i gmin na Słowacji. Wykorzystując komponenty klastra IOASC można wdrożyć najnowsze metody analityki i przetwarzania danych nawet w przypadku przestarzałych systemów, w tym istniejącej infrastruktury. Komponenty systemu mogą równolegle analizować dane z systemów kamerowych z mocą do 242 Tera operacji na sekundę (TOPS), tworząc szybkie i inteligentne rozwiązanie do zaawansowanej analizy obrazu z już zainstalowanych kamer.
System implementuje ponad 462 modele do przetwarzania danych, co pozwala identyfikować w czasie rzeczywistym następujące parametry jakościowe i ich wzajemne relacje:
- tablica rejestracyjna, marka i kolor pojazdu
- klasyfikacja pojazdów — karetka, straż pożarna, policja
- analityka behawioralna uczestników ruchu — pieszych, rowerzystów
- identyfikacja parametrów behawioralnych w obrębie strefy (np. obiekt w czarnej kurtce, mężczyzna 35–45 lat, z psem, w czapce z daszkiem); definicyjny zbiór świadków danego obiektu
- pomiar parametrów fizycznych obiektów — temperatura, wysokość, trajektorie
- identyfikacja incydentów — agresywne zachowanie, wypadek
- analityka behawioralna trajektorii uczestników ruchu drogowego
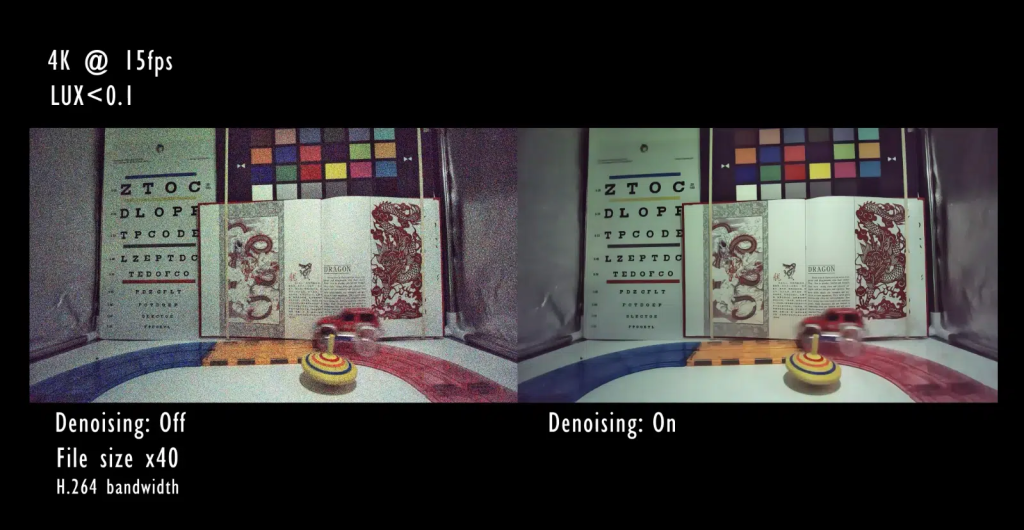
- jakościowy postprocessing nagrań kamerowych (denoising)
Na podstawie zastosowania poszczególnych modeli można tworzyć dowolne funkcje analityczne z wykorzystaniem uczenia maszynowego — w czasie rzeczywistym. Poszczególne jednostki fizyczne są łączone w klaster, który następnie agreguje zidentyfikowane dane i ocenia funkcje korelacyjne wyższego rzędu:
- parametry statystyczne — liczba osób dojeżdżających do pracy, liczba przejeżdżających przez miasto/gminę
- zachowanie pojazdów
- naruszenia przepisów ruchu drogowego — odcinkowy pomiar prędkości, naruszenie trajektorii, jazda na czerwonym świetle, nieudzielenie pierwszeństwa, niezatrzymanie się przy znaku STOP i inne
- prognozowanie i modelowanie sytuacji drogowych
- identyfikacja oznaczonych lub monitorowanych pojazdów z funkcjami korelacyjnymi i prognozowaniem
- identyfikacja pojazdów odbiegających od średniej trajektorii — spożycie alkoholu, awaria pojazdu
Wymienione parametry są oceniane przez system na wszystkich połączonych węzłach klastra, a decentralizacja mocy obliczeniowej gwarantuje pracę w czasie rzeczywistym nawet przy setkach równoległych strumieni. Poszczególne modele są rekurencyjnie tagowane przez sam system i operatorów (zazwyczaj funkcjonariuszy straży miejskiej), co umożliwia ciągłą adaptację klasyfikatorów i stopniowe zwiększanie zgodności wyników z rzeczywistością.
2. Tworzenie modeli: potok uczenia maszynowego
Biblioteka 462+ modeli nie jest statycznym artefaktem — jest produktem ciągłego cyklu MLOps prowadzonego przez IOAS dla każdego klienta. Potok składa się z siedmiu etapów; każdy z nich jest niezależnie konteneryzowany i poziomo skalowalny.
2.1 Akwizycja i kuracja danych
Dane wejściowe pochodzą z trzech źródeł:
- Strumieniowanie RTSP/ONVIF z istniejących systemów kamerowych klienta — IOASC obsługuje H.264, H.265 (HEVC) i AV1, z automatycznym wykrywaniem i naprawą niespójnych klatek kluczowych lub utraty pakietów.
- Skuratorowane korpusy — dla standardowych dziedzin (pojazdy, piesi, tablice rejestracyjne) IOAS utrzymuje wewnętrzne zbiory danych z ponad 2,4 mln oznaczonych klatek (stan na 2026 Q2), zebranych z rzeczywistych słowackich i środkowoeuropejskich środowisk miejskich (różne warunki oświetleniowe, pogodowe, pory roku).
- Historia operatora — straże miejskie i zintegrowane służby ratunkowe dostarczają informacji zwrotnej w postaci poprawek detekcji, co rozszerza kolejkę active-learning (sekcja 2.4).
Przed treningiem wszystkie dane przechodzą przez warstwę deidentyfikacji zgodną z RODO Art. 35 — twarze osób niezaangażowanych są rozmazywane, tablice rejestracyjne nie są zapisywane jako surowe znaki, lecz jako one-hot embeddingi do dalszego przetwarzania.
2.2 Architektury modeli
Biblioteka IOASC grupuje modele w siedem rodzin według głównego zadania:
| Rodzina | Główne architektury | Typowa wydajność (FPS @ INT8 na NPU 240 TOPS) |
|---|---|---|
| Detekcja obiektów | YOLOv8/v9, RT-DETR-L, EfficientDet-Lite | 350 – 600 FPS przy 1280×720 |
| Wieloobiektowe śledzenie | ByteTrack, BoT-SORT, StrongSORT | 280 – 450 FPS |
| Automatyczne rozpoznawanie tablic (ANPR) | LPRNet + CRNN, ParseQ dla OCR | 200 – 320 FPS |
| Rozpoznawanie czynności / zachowań | SlowFast R50, TimeSformer, MViTv2 | 60 – 110 FPS (krótkie 32-klatkowe klipy) |
| Re-identyfikacja osób | OSNet-IBN, FastReID | 700 – 900 FPS na embedding |
| Poprawa obrazu (denoising) | NAFNet, Restormer-S | 90 – 150 FPS przy 1080p |
| Detekcja anomalii | PaDiM, PatchCore, AnomaLib stack | 250 – 380 FPS |
Dla każdej rodziny IOAS utrzymuje 3 – 5 wersji w różnych proporcjach dokładność ↔ opóźnienie: *-tiny dla węzłów brzegowych z ograniczonym budżetem, *-base dla standardowego wdrożenia, *-large dla krytycznych lokalizacji (główne skrzyżowania, wejścia do budynków publicznych).
2.3 Infrastruktura treningowa
Trening odbywa się w dedykowanej training cell infrastruktury IOAS o następujących parametrach:
- 8× NVIDIA H100 SXM połączone przez NVLink + InfiniBand 400 Gbps
- Rozproszony data-parallel trening przez PyTorch FSDP (Fully Sharded Data Parallel) ze sharded optimizer state (ZeRO Stage 3)
- Mixed-precision BF16 / FP8 (Hopper sparsity) — 2,1 – 2,8× szybsza zbieżność niż FP32
- Gradient accumulation z efektywnym batch size 256 – 1024 zależnie od modelu
- Stochastic Weight Averaging (SWA) w końcowej fazie dla bardziej odpornych wag
- Per-eksperyment przeszukiwanie hiperparametrów przez Optuna ze schedulerem ASHA
Trening pojedynczego modelu produkcyjnego trwa od 6 godzin (LPRNet fine-tune) do 5 dni (RT-DETR-L na własnym zbiorze 2,4 M klatek).
2.4 Optymalizacja pod wdrożenie (model serving)
Wytrenowane modele przechodzą trzystopniową kompresję przed wdrożeniem na brzegu:
- Strukturalny pruning — usunięcie 30 – 60 % redundantnych wag przez kryteria magnitude-based + Taylor expansion; zmniejsza ślad pamięciowy zachowując > 99 % dokładności.
- Kalibracja INT8 (post-training) — zbiór kalibracyjny 1024 rzeczywistych klatek, kwantyzacja per-channel symetryczna; typowa strata < 0,8 % mAP.
- Layer fusion + optymalizacja grafu — fuzja Conv+BN+ReLU, eliminacja redundantnych operacji reshape, konwersja ONNX → TensorRT/Hailo-RT.
Ten artykuł jest częścią płatnych treści IOAS.
Bezpieczna płatność przez Stripe · dostęp przywracalny przez e-mail, bez rejestracji